PAVAS Wheel Lock Processing
The PAVAS datalog recording is designed with the philosophy that it will be completely automatic during the running of rally during the day. This means that there is no required interaction from the crew. This approach relies on the concept that prior to a stage commencing, the vehicle will be stopped and that data is not collected while the vehicle is stopped. This implies that once the speed is non zero, the vehicle is moving and the data can be analyzed to extract to identify and extract the stage information. This process is described in the Data Processing Tab. The technique works well but if Wheel Lock occurs during the stage, then the stage identification will fail since a spurious zero speed condition will occur during the stage. This will falsely indicate the stage has ended and corrupt the analysis.
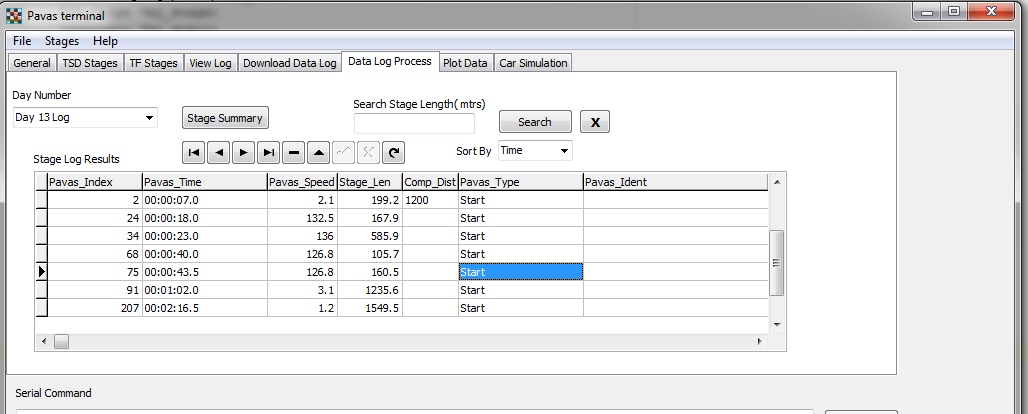
To overcome, this a special Wheel Lock software tool has been developed which is applied in post processing of the downloaded data file. This tool relies on setting the Competition Distance for each stage. The easiest way to to do this is by identifying the stage by the stage length parameter, which in the case of wheel lock, will be incorrect. To identify a stage, the time of day at the start of the stage can be used. Obliviously, if two time of day values are close to one another, the second is the start of spurious stage. The second way is by looking at the speed at the start of a stage. If the stage starting speed is quite high, it may be because the wheel is accelerating quickly to the road speed after a wheel lock. This is more complex but used in conjunction, with the time of day may confirm the wheel lock condition. The image below show stages in the day's data where Wheel Lock has occurred.
Note that the competition distance has been set and that some of the stage show a stage length that is far less than the competition distance. In addition, the initial speed for the stage is quite high
How to correct for Wheel Lock?
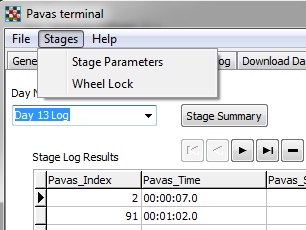
The tool is activated by selecting Stages/Wheel Lock.
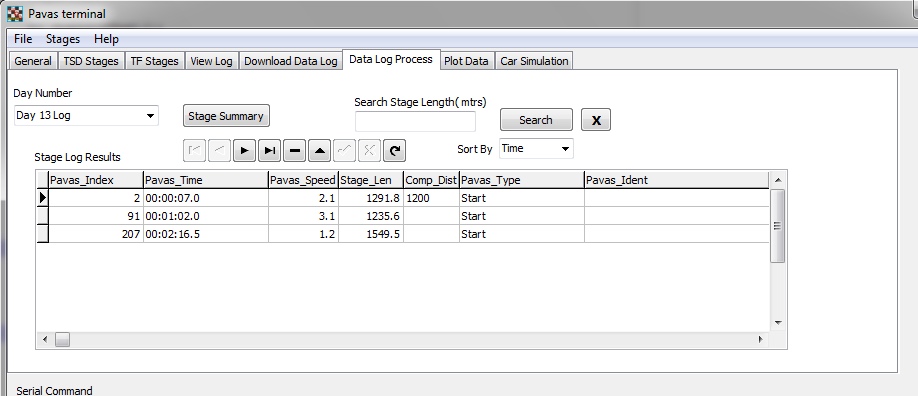
The software then searches through all stages for the day's data where the Competition distance has been set. It then looks for any zero speed conditions that are less then the Competition Distance. Once found, the speed values are changed to 0.1 KPH. This value has been chosen because it is non zero and most unlikely to occur in practice. Based on common wheel sizes and probe configurations, the minimum speed that can be measured by a PAVAS system is 0.25 to 0.5 kph. The software then saves the user entered data of the Competition Distance and the Stage name. It then processes all the modified data for the day to find the stages. Lastly it re-enters the User data and displays the list of stages. The spurious stages caused by Wheel Lock are now removed.
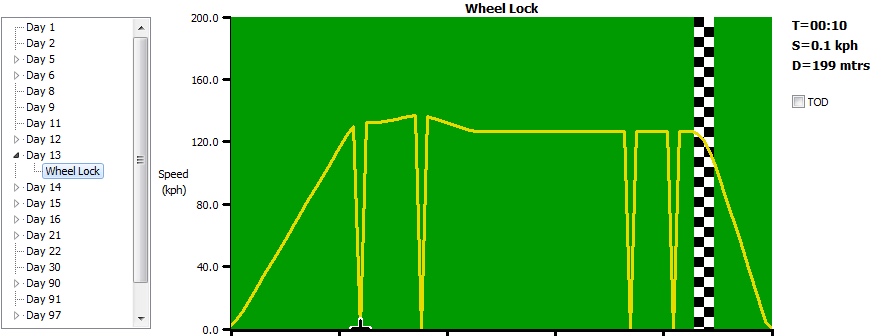
Here is an image where the Wheel Lock conditions has been removed.
When
a stage is plotted the 0.1 kph data points will still be obvious,
indicating where the wheel lock occurred.